


无线手轮-脉冲发生器-手脉稳定性说明
无线电子手轮,手脉,手摇脉冲发生器,应用于维宏系统,维宏卡,德国西门子(SIEMENS)、日本三菱(MITSUBISHI)、法那科(FANUC)、西班牙发格(FAGOR)、法国NUM、台湾宝元、
新代等数控系统;德国TKD电缆,直线导轨压块等数控机床附件,产品广泛应用于数控雕铣机、数控铣床、数控车床、加工中心等。新宏畅无线科技有限公司生产的无线手轮有;WHB02,WHB03,
WHB04,WGPX系列。
在科技发展到今天,我们已经能让越来越多的无线产品走进千家万户,进入各个行业,从民用的无线鼠标,无线键盘到工业控制的无线机器人,再到国防科研用的远程遥感控制。无线技术进入
了一个长足发展,多点开花的时代,有很多用户对无线的稳定性及可靠性持怀疑态度。以下将对无线技术的可靠及稳定性作出一个全面的释疑。
近日,应用于数控行业的无线电子手轮的用户越来越多,我们的售后服务人员,跟踪和回访客户,整理归纳出问题的主要几大类,现将问题解决如下,希望能带给用户更大的帮助。
1.问:无线手轮和传统手轮有什么区别?能带来什么好处?
答:无线手轮最大的特点就是保证传统手轮的功能以外,采用无线传输,不需要有线连接,减少了
机床的连接线,能带给用户更方便的自由。
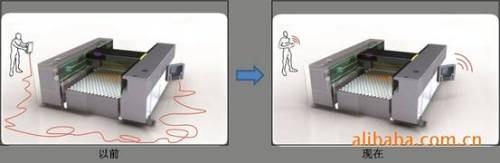
采用无线传输后能带给用户以下好处:
1) 用户手拿手轮,可以围绕机床自由移动操作,带来很大的便利性
2) 移动自由,提高工作效率
3) 摆脱有线的连接,与有线手轮相比较,有线手轮的线的接头处内部的连线容易断裂,使用时间长了,会连接不可靠;无线手轮由于没有线连接,所以使用上杜绝了有线手轮的这个毛病;使用寿命长。
2. 问:无线手轮采用的是无线连接,会存在不稳定性吗?比如干扰什么的?会不会引起机
床移动异常,最后不受控制,引起加工零件受损坏?
答:不会存在不稳定的情况;无线连接受干扰,不会引起机床继续移动,不会引起机床的异常操作。 机床本来是工业加工,高精确度的产品,我们在把有线手轮更改为无线的传输模式的情况下,
我们的工程师就已经考虑了必须要把无线存在的不稳定可靠性;我们通过我们专利的智能无线传输协议,保证了无线稳定可靠传输,保证数据不丢失,即使丢失了数据,也不会产生机床的错误动
作,甚至继续运行。
解释这个问题之前,请先看看我们手轮的无线工作过程:

我们的无线手轮通过无线网络将机床和手轮连接起来,无线手轮的操作,通过无线网络将数据无线传输到机床的无线接收器,无线接收器将传输过来的数据传输给机床运动控制卡,运动控
制卡控制机床的电机,从而实现手轮无线进行机床控制。当用户手持手轮进行按键或摇动手轮的时候,手轮的脉冲信息和按键信息通过无线网络传输给机床端的无线接收器,无线接收器将手轮
脉冲信息和按键信息传输给运动控制器,运动控制器将指挥电机运动。如果手轮距离远了,或无线受干扰了,那么传输过去的脉冲数据将丢失,那么接收器将没有脉冲或按键信息传输给机床,
那么机床将不会继续移动。
我们的无线网络保证了数据的稳定性和可靠性传输,使得在正常的通讯距离内,数据不会丢失。这个是怎么做到的呢?
1.数据重传方式保证了数据的稳定可靠性,如下图指示:
.jpg)
比如用户摇动了10个脉冲,那么无线手轮会将这10个脉冲送给接收器,如果受干扰,数据丢失了,那么手轮将继续重新将这10个脉冲数据送给机床,直到接收器收到为止。所以,我们采用应答方
重传的方式来保证了数据的稳定可靠,不丢失。应答重传在4毫秒内全部完成,不会造成数据的延迟,保证了操作的及时性!
2.采用跳频方式,可以有效的避开干扰,保证了数据的稳定性和可靠性 。工作原理如下图:
.jpg)
我们的无线手轮不是采用单一的一个频道进行工作,不象传统的收音机一样,受到干扰,就听不清楚。我们有64个频道工作。在工作的同时,检测该频道是否还有其他干扰源存在,如果存
在,那么我们的手轮将选择一个新的频道进行工作,保证数据的可靠性传输,保证数据不丢失。
经过以上解释描述: 我们的无线手轮由于采用我公司专利的无线通讯协议,保证了远距离等信号不好的时候,机床不会异常运动;在工作距离以内,采用数据应答重传和跳频通讯方式,保
证了数据的稳定性,可靠性,数据不会丢失。
.jpg)